Optimizers
https://youtu.be/mdKjMPmcWjY
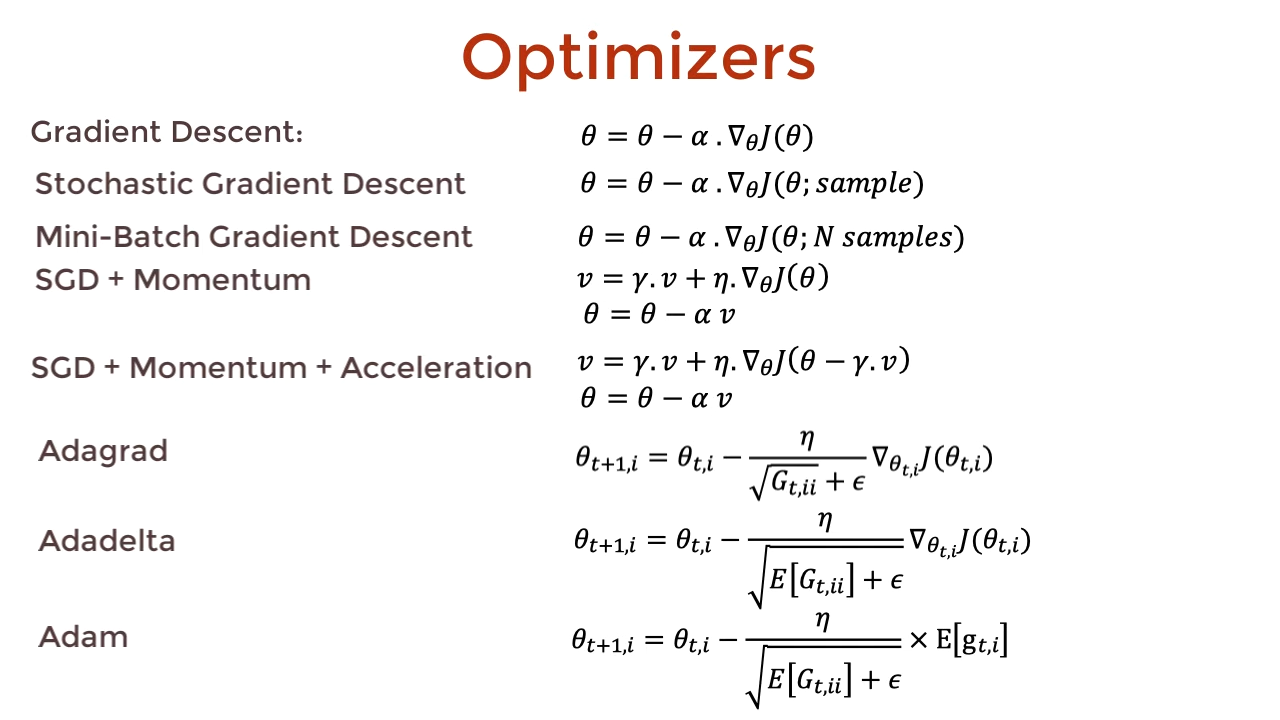
Gradient Descent
- Update once every epoch
- \(\begin{align}\theta = \theta - \alpha \nabla_{\theta}J(\theta)\end{align}\).
Stochastic Gradient Descent
- update every sample
- Takes long
- sensitive to each sample
- \(\begin{align}\theta = \theta - \alpha \nabla_{\theta}J(\theta)\end{align}\).
Mini-batch Gradient Descent
- Decrease noise of SGD
- update every N-sample
- \(\begin{align}\theta = \theta - \alpha \nabla_{\theta}J(\theta)\end{align}\).
SGD + Momentum
- Decrease noise of SGD
- \(\begin{align}v = \gamma v + \eta\nabla_{\theta}J(\theta)\end{align}\).
- \(\begin{align}\theta = \theta - \alpha v\end{align}\).
- parameters of a model tend to change in single direction as examples are similar.
- pros
- With this property, using momentum, a model learns faster by paying little attention to some samples.
- Cons
- Choosing samples blindly not guarantee the right direction.
SGD + Momentum + Acceleration
- \(\begin{align}v = \gamma v + \eta\nabla_{\theta}J(\theta-\gamma v)\end{align}\).
- \(\begin{align}\theta = \theta - \alpha v\end{align}\).
Adaptive Learning Rate Optimizers
- learn more along one direction than another
Adagrad
- for every epoch \(t\)
- for every parameter \(\theta_{i}\)
- \(\begin{align}\theta_{t+1, i} = \theta_{t, i} - \frac \eta {\sqrt{G_{t, ii}} + \epsilon}\nabla_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- \(\begin{align}G_{t, ii} = G_{t-1,ii} + \nabla^{2}_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- or \(\begin{align}G_{t, ii} = \nabla^{2}_{\theta_{1,i}}J(\theta_{1,i}) + \nabla^{2}_{\theta_{2,i}}J(\theta_{2,i}) + \nabla^{2}_{\theta_{3,i}}J(\theta_{3,i}) + \cdots + \nabla^{2}_{\theta_{t,i}}J(\theta_{t,i})\end{align}\)
- \(\begin{align}G_{t, ii}\end{align}\) : Sum of squares of the gradients w.r.t \(\theta_{i}\) until that point
- Problem:
- G is monotonically increasing over iterations
- LR will decay to a point where the parameter will no longer update (no learning)
- \(\begin{align}\frac \eta {\sqrt{G_{t, ii}} + \epsilon}\end{align}\) tends to 0
- learns slower
Adadelta
- for every epoch \(t\)
- for every parameter \(\theta_{i}\)
- reduce the influence of the past squared gradients by introducing gamma weight to all of those gradients
- reduces the effect exponentially
- \(\begin{align}\theta_{t+1, i} = \theta_{t, i} - \frac \eta {\sqrt{E[G_{t, ii}]} + \epsilon}\nabla_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- \(\begin{align}G_{t, ii} = \gamma G_{t-1,ii} + (1-\gamma)\nabla^{2}_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- \(\begin{align}\frac \eta {\sqrt{E[G_{t, ii}]} + \epsilon}\end{align}\) not tend to 0
Adam (Adadelta + momentum)
- for every epoch \(t\)
- for every parameter \(\theta_{i}\)
- Adadelta + expected value of past gradients
- \(\begin{align}\theta_{t+1, i} = \theta_{t, i} - \frac \eta {\sqrt{E[G_{t, ii}]} + \epsilon}E[g_{t,i}]\end{align}\).
- \(\begin{align}G_{t, ii} = \gamma G_{t-1,ii} + (1-\gamma)\nabla^{2}_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- \(\begin{align}E[g_{t,i}] = \beta E[g_{t-1,i}] + (1-\beta)\nabla^{2}_{\theta_{t,i}}J(\theta_{t,i})\end{align}\).
- slow initially, pick up speed over time.
- similar to momentum
- different step size for different parameters
- With momentum for every parameter, Adam leads to faster convergence
- This is why Adam is de facto of optimizer of many projects.
ref: https://youtu.be/mdKjMPmcWjY

Leave a comment